21. März
2004
Das neue Videosystem ist eingebaut und wartet auf den Frühling, resp.
darauf, dass ich das Boot bei warmen Temperaturen testen kann. Wenn
alles klappt, ist dieses Projekt soweit abgeschlossen. |
|
25. Mai
2002
Endlich war es heute soweit und ich konnte meine Tests durchführen. Der
Aufbau des Tests dauerte gut 15 Minuten. Ich baute die Testumgebung auf
meine Schiff auf, so hatte ich die Möglichkeit zu Hilfe zu eilen, falls
es ein Problem mit dem Modell gegeben hätte. Bei den Tests kam ich dann
zu folgenden Ergebnissen:
|
|
Das Telemetrie-System
von Conrad funktionierte einwandfrei. Ich testete es bis zu einer
Distanz von ca. 50m. Weiter traute ich mich mit dem Modell nicht zu
fahren, da ich auch den Computer, resp. die Datenübertragung im Auge
behalten musste.
Wegen des guten Resultats machte ich keine Tests mit den
DECT-Datenfunkeinheiten. |
|
|
Das Videosystem
hingegen lies sehr zu wünsche übrig. Die Übertragung war oft gestört
und abhängig von der Ausrichtung des Bootes, wie auch der
Empfangseinheit. Am Besten funktionierte es, wenn das Modell stillstand
und der Empfänger ausgerichtet werden konnte. |
|
|
Ein weiterer Punkt der
zutage kam ist, dass das Boot einen zu hohen Schwerpunkt hat und auch
nicht richtig balanciert war. Es hatte leicht Schlagseite und auch
kleine Wellen bringen es stark zum schaukeln. Auch liegt es tief im
Wasser und ist mit 7.1kg auch recht schwer, so dass die
Motoren/Schiffsschrauben-Kombination nicht sehr gut gewählt ist. |
Mit diesen Erfahrungen, werde ich mich nun daran machen
das Boot und die Technik ein wenig umzubauen. Ich habe noch ein anderes
Videoübertragungs-System, das bis jetzt im Trockenen auch besser
funktioniert hat. Ich werde dieses mal ausprobieren. Dann muss sicher
das Boot besser ausbalanciert werden und die verschiedenen
Drahtleitungen sauber im Rumpf verlegt werden. Zum Schluss muss ich die
beiden Antriebsstränge nochmals etwas überdenken, damit das schwere
Boot besser durchs Wasser gebracht wird.
|
 |
20. Mai
2002
Am Samstag bereitete ich das Boot zweieinhalb Stunden vor und machte
nochmals alle Tests zu Hause. Um sicher zu sein, dass nichts schiefgeht
am Montag bei der Testfahrt. Am Montag stimmte das Wetter, ich hatte
Zeit, das Boot war Ready, aber die Wellen im See zu hoch. Ich hoffe,
ich komme bald zu meinen Tests! |
|
25. April
2002
Entweder stimmt das Wetter nicht, oder ich habe keine Zeit, um meine
Erfahrungen und Test auf dem See zu machen. So verwende ich die Zeit an
anderen Modellen zu arbeiten und meine Homepage etwas zu reorganisieren. |
|
24.
Dezember 2001
Nach erfolgreichen Tests des neuen Telemetrie-Systems und der
Videokamera ist nun ein Stand erreicht, um Erfahrungen mit dem Umgang
zu sammeln. Da die Jahreszeit momentan nicht gerade
Modellbau-Schifffahrt gerecht ist, wird es noch eine Weile dauern, bis
das Schiff zum Einsatz kommt.
Bis jetzt sind folgende Funktionen eingebaut:
|
|
Ruder links/rechts |
|
|
Ansteuern der beiden
Motoren mit getrennten Kanälen. (Zum Lenken ist es leider weniger
geeignet, da die Schrauben zu nahe beieinander sind.) |
|
|
Wasserwerfer (auf/ab,
links/rechts, ein/aus) |
|
|
Schlepphacken mit
ferngesteuertem ausklinken) |
|
|
Videokamera (auf/ab,
links/rechts, ein/aus) mit Videoübertragung per Funk. |
|
|
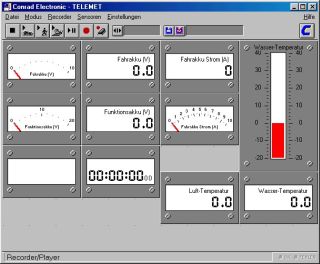
Telemetrie mit
folgenden Daten erfasst:
|
|
Wassertemperatur |
|
|
Lufttemperatur |
|
|
Fahrakku-Spannung |
|
|
Fahrakku-Strom |
|
|
Empfänger-/Sonderfunktionsakku-Spannung |
|
Die Sonderfunktionen werden über ein
Multifunktions-Modul gesteuert und die Video-/Telemetrieübertragung
wird auf einem Subnotebook dargestellt. Das Bild rechts zeigt die
Anordnung der Messinstrumente des Telemetrie-Systems.
|
 |
November
2001
Der neue Videosender wurde geliefert und montiert (kleine schwarze,
senkrechte Box). So wurden auch die ersten Tests mit der montierten
Kamera gemacht, leider mit einem schlechten Resultat. Die Farbkamera
hat eine verwaschene Farbwiedergabe (anscheinend bedingt durch das
fehlende IR-Filter). Daher werde ich die nächsten Tests mit eine
S/W-Kamera und mit einer zweiten (anderes Fabrikat) Farbkamera machen. |
 |
22.
September 2001
Die Versuche mit meiner Software und den DECT-Funkmodem läuft zur
Zufriedenheit. Jetzt muss das Ganze nur noch im Schiff untergebracht
und die Software ergänzt werden. |
|
April -
August 2001
Erste Test auf dem Wasser (Zürichsee) wurden unternommen. Dabei wurde
festgestellt, das die beiden Akkus zusammen zu schwer sind und so das
Boot zu tief im Wasser liegt. So wurde der Akku für die Versorgung der
Zusatzfunktionen (12V/7Ah) durch einen etwas kleineren Akku (12V/3Ah)
ersetzt. Damit wurden gute Ergebnisse erzielt.
Mehr Probleme bereitet das Telemetrie-System. Test mit
direkter Verbindung zwischen Telemetrie-Einheit und Computer läuft
alles Bestens. Wird hingegen die Funkstrecke dazwischengeschaltet, so
läuft es einigermassen OK auf der Werkbank, allerdings draussen geht
nichts mehr. Dies bietet nun noch einige Knackpunkte.
Als erstes wurden nun DECT-Funkmodem von Siemens
angeschafft. Die Einheit für den PC wird an den USB angeschlossen (M105
Data) und läuft dort zuverlässig als virtueller Port 5 (COM5). Die
Telemetrie Software erlaubt aber nur den Anschluss von COM1 bis COM4.
Das heisst ich muss noch meine eigene Telemetrie Software schreiben.
Dies wird aber noch einige Zeit dauern.
Auf der Seite des Bootes habe ich die Einheit M101 Data.
Diese wird seriell angeschlossen.
Die montierte Videokamera läuft zufriedenstellend. Ich
bin aber dabei einen etwas handlicheren Videosender zu organisieren,
was ebenfalls noch nicht geschehen ist.
Die Saison geht nun langsam dem Ende zu und ich muss
noch viel Arbeit investieren, bis alles so läuft wie ich es möchte.
|
|
März 2001
Nach der Lackierung wurde mit dem Einbau der einzelnen Komponenten am
Aufbau begonnen. Hier sieht man die Kamera und den Wasserwerfer. Auf
der Rückseite ist noch eine Abschleppkupplung montiert. |
 |
Februar
2001
Danke dem schönen und warmen Wetters konnte Rumpf und Aufbau bei
frühlingshaftem Wetter im Freien lackiert werden. |
|
November 2000 - Januar 2001
Die weitere Verkabelung der Telemetrie- und Fernsteuereinheit schreitet
voran. Bedingt durch lange Lieferfristen von bestelltem Material kommt
das Ganze nur zögerlich voran. Weiter wurde die Mechanik zum Drehen und
Schwenken des Wasserwerfers im vorderen Teil des Aufbaues eingebaut. Da
die verwendeten Servos etwas gross sind und der Platz eher knapp, wurde
die ganze Einheit vorher auf einem separaten Brett aufgebaut. |
|
18.
November 2000
Test!, Test!, Test!
Ich musste leider feststellen, dass ich bis jetzt vergessen habe die
ersten elektronischen Einbauten, sprich Motoren, Empfänger,
Fahrtenregler und Telemetrie-System. Und prompt hat sich Murphy zu
werke gemacht und der grösste Teil lief nicht. So musste ich einen Teil
neu verdrahten, was sich leider nicht mehr so einfach gestaltete, da
das Deck nun schon fest verleimt war. Es ist eine Lehre fürs nächste
Mal! |
|
Oktober
2000
Nachdem der Aufbau mit Karton getestet wurde, ging es an den richtigen
Aufbau aus Holz. Einige kleine Änderungen wurden noch vorgenommen. So
wurde die Frontpartie abgeschrägt. Nachdem der Aufbau verschliffen war,
kam eine erste Schicht Grundierfarbe darauf. |
 |
3.
September 2000
Aus Karton wurde ein erster Entwurf des Aufbaues gemacht, um die Masse
zu überprüfen. Weiter sieht man den Kamerahalter und die Plazierung des
Wasserwerfers. Die Kamera wurde auf zwei Servos montiert, damit sie in
den zwei Achsen (Auf/Ab und Links/Rechts) verstellt werden kann. |
 |
1. August
2000.
Mit 0.8mm starkem Sperrholz wurde das Deck mit den Rippen verleimt.
Dazu verwendete ich normalen 2 Komponenten Kleber (Araldit Blau).
Ebenfalls wurden die Übergänge zwischen Deck und Rumpf so verklebt und
abgedichtet. Danach wurden das überstehende Rumpfmaterial bis aufs Deck
runter gehobelt und verschliffen. Als nächstes verleimte ich 8x8 mm
Tannenleisten mit dem Deck für die Führung der Aufbauten. |
 |
3. April
2000
Einen Teil der Elektronik (Empfänger und Telemetrie) wurde bereits
eingebaut und das Gerüst für das spätere Deck eingesetzt. Die Kabel
werden noch gebündelt und rechts (Fernsteuerung) und links (Telemetrie)
entlang des Rumpfes nach vorne geführt, wo sich die Elektronik befindet. |
 |
Winter
1999/2000
Das Bild zeigt den Rumpf des Modells mit
eingebauten Motoren und plazierten Akkus. Der vordere Akku (12V/7Ah)
speist die Empfangsanlage und das Telemetriesystem.
Der hintere Akku (6V/8Ah) speist die beiden Antriebsmotoren (Jumbo 540
6V). |
 |